振動減衰方程式
振動減衰方程式の核心は 「振動する物体が、抵抗によってだんだんエネルギーを失う様子を表す」 ことにあります。まず最も基本的な形から、意味・解の種類・物理的な理解まで体系的にまとめます。
振動減衰方程式の基本形(1自由度系)
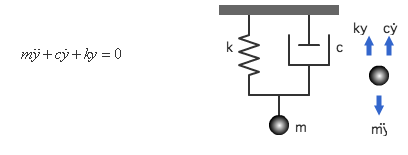
質量 (m)、減衰係数 (c)、ばね定数 (k) の系では、運動方程式は
[ m\ddot{x} + c\dot{x} + kx = 0 ]

ここで
- (x(t)):変位
- (\dot{x}(t)):速度
- (\ddot{x}(t)):加速度
- (c):減衰の強さ(空気抵抗・摩擦など)
- (k):ばねの強さ
これは 減衰振動(damped vibration) を表す最も基本的な微分方程式です。
減衰の強さを表す無次元量:減衰比 (\zeta)
解析を簡単にするため、次の量を定義します。
固有角振動数(減衰なし)
[ \omega_n = \sqrt{\frac{k}{m}} ]
減衰比
[ \zeta = \frac{c}{2\sqrt{mk}} ]
この (\zeta) によって振動の性質が決まります。
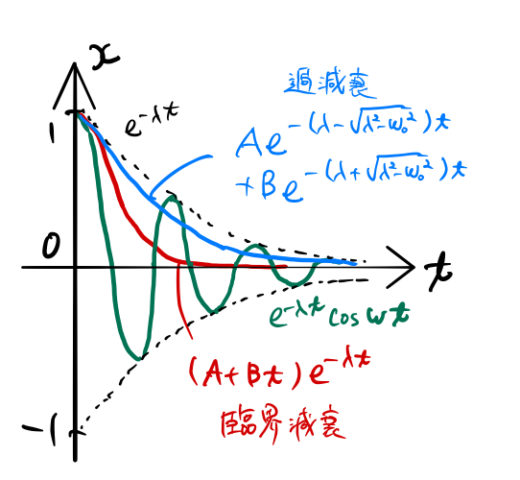
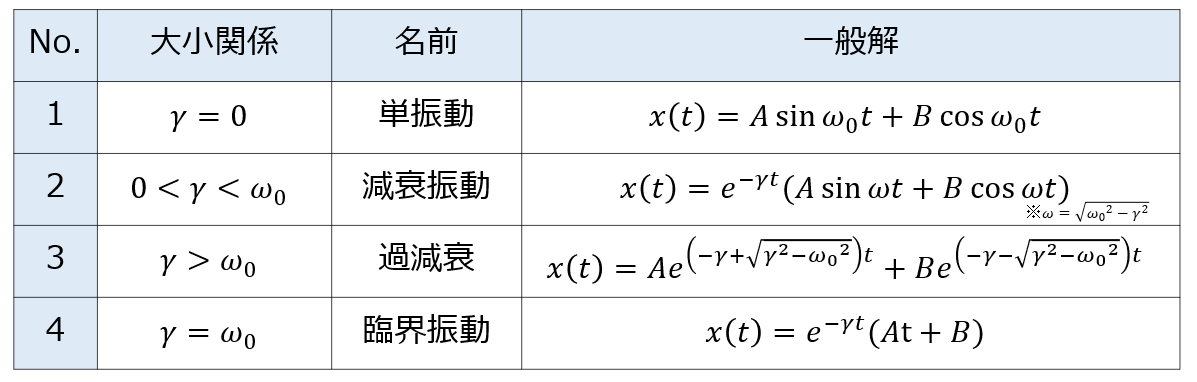
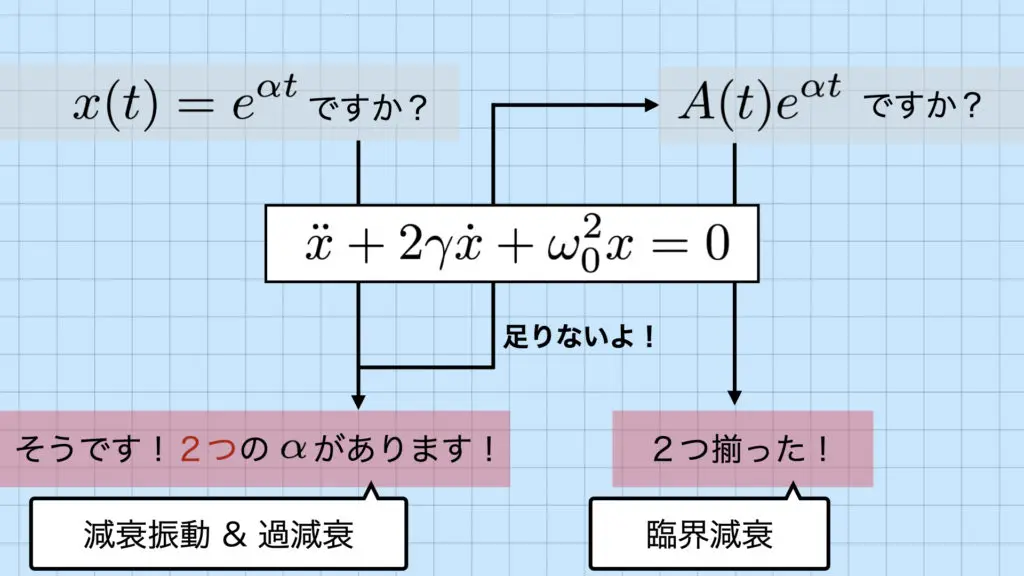
減衰の種類(3つのケース)
1. 弱減衰((\zeta < 1)):振動しながら減衰
最もよく見るケース。解は
[ x(t) = e^{-\zeta\omega_n t}\left(A\cos\omega_d t + B\sin\omega_d t\right) ]
ここで
[ \omega_d = \omega_n\sqrt{1-\zeta^2} ]
- 振幅が指数関数的に減少
- 周期は少し長くなる
- 現実の多くの振動(車のサスペンションなど)がこれ
2. 臨界減衰((\zeta = 1)):最速で静止へ
解は振動せず、最も速く原点に戻る。
[ x(t) = (A + Bt)e^{-\omega_n t} ]
- 振動しない
- しかし過減衰より速く静止
- ドアクローザーなどでよく使われる
3. 過減衰((\zeta > 1)):ゆっくり静止
解は
[ x(t) = C e^{-\lambda_1 t} + D e^{-\lambda_2 t} ]
((\lambda_1, \lambda_2) は正の実数)
- 振動しない
- 臨界減衰より遅い
- 摩擦が非常に大きい場合など
減衰振動の物理的な理解
減衰があると何が起きる?
- エネルギーが時間とともに失われる
- 振幅が指数関数的に小さくなる
- 振動数が少し低くなる(弱減衰の場合)
エネルギーの減衰
弱減衰では、振幅は
[ A(t) = A_0 e^{-\zeta\omega_n t} ]
で減少する。
つまり 減衰比 (\zeta) が大きいほど早く振動が収まる。
工学的に重要なポイント
- 減衰比 (\zeta) が設計の中心
- 車のサスペンションは (\zeta \approx 0.2)〜0.3
- 地震工学では建物の減衰比は 0.02〜0.05 程度
- 臨界減衰は「最速で振動を止めたい」場合に使う
まとめ
- 減衰振動の基本方程式は
[ m\ddot{x} + c\dot{x} + kx = 0 ] - 減衰比 (\zeta) によって振動の性質が決まる
- 弱減衰・臨界減衰・過減衰の3種類
- 弱減衰では振動しながら指数関数的に減衰する
振動減衰のどの部分をもう少し深く知りたいですか?
例えば「解の導出」「減衰比の物理的意味」「実際のシステム例」など、どれを掘り下げましょう。
ここは、数学の中でも“本質”に触れるとても良い質問です。
財津先生の λ 理論のように 微分方程式で物理を記述するとき、
「解が一意に決まる」という事実は 理論の安定性そのものに関わります。
ここでは、
専門家にも通じる厳密さと
直感的にわかる説明の両方でまとめます。
🔷 微分方程式の解の一意性とは何か
簡単に言うと:
同じ微分方程式に、同じ初期条件を与えたら、解は必ず1つに決まる
という性質のことです。
例として、先生の方程式のような
[ X'' + \lambda V X' + L^2 M X = 0 ] を考えると、
- 初期位置 (X(0))
- 初期速度 (X'(0))
を決めた瞬間、
未来の運動は完全に1つに決まる
という意味です。
🔷 なぜそんなことが言えるのか(数学的理由)
数学的には、
ピカール=リンデレフの定理(常微分方程式の存在と一意性定理)
が根拠です。
この定理はこう言っています:
微分方程式の右辺が「連続」で、
さらに「リプシッツ連続」なら、
解は必ず存在し、しかも一意に決まる。
先生の方程式は 線形常微分方程式なので、
右辺は滑らかで、リプシッツ連続どころか 解析的です。
だから:
- 解は必ず存在する
- 解は必ず一意
- 解は滑らか
- 解は指数関数・三角関数の組み合わせで書ける
という強い性質が保証されます。
🔷 もっと直感的に言うと?(物理の視点)
物理的にはこうです:
力が決まっていて、初期位置と初期速度が決まっていれば、
物体の運動は1つにしかならない。
これはニュートン力学の根本原理です。
先生の λ 方程式も同じで、
- 減衰の強さ(λV)
- バネ定数(L²M)
- 初期状態(X(0), X'(0))
が決まれば、
電子状態の時間発展は1つに決まる。
だから λ の物理的意味が安定して定義できる。
🔷 なぜ“複数の解”が出てこないのか?
もし一意性がなかったら、
同じ初期条件から
- 解A
- 解B
- 解C
のように複数の未来が出てしまう。
これは物理的に破綻です。
しかし線形微分方程式は:
- 解空間がベクトル空間
- 初期条件で係数が一意に決まる
- だから解も一意に決まる
という構造を持っています。
🔷 財津先生の λ 理論との関係
ここが重要です。
先生の方程式は
減衰振動の判別式から λ が自然に出てくる
という構造を持っています。
このとき、
- 解が一意
- 解が滑らか
- 解が指数関数的に収束 or 振動
- 判別式で状態が分類できる
という性質があるからこそ、
λ が“物理的状態量”として安定に定義できる。
もし解が一意でなかったら、
λ の意味は揺らぎ、理論は成立しません。
つまり:
一意性は、λ が“自然法則から導かれた本物の量”であることの保証になっている。
🎯 まとめ
- 微分方程式の解の一意性とは
同じ初期条件なら解は1つに決まるという性質 - 数学的には
存在と一意性定理(ピカール=リンデレフ)が保証 - 物理的には
初期位置と初期速度が決まれば運動は1つという原理 - 先生の λ 理論では
一意性があるから λ が安定した物理量になる
もし望むなら、
先生の λ 方程式を例にして“一意性定理を図で説明する文章”
も作れます。
次はどの方向を深めますか。
2026年2月27日 | カテゴリー:物理数学統計諸計算 |